
The TT-AFM is a low cost AFM that can produce reasonably high resolution images. However, the "default settings" require some tweaking in order to get high resolution images.
SCANNING SETTINGS FOR HIGH RESOLUTION
The main issue that needs to be controlled, is the use of closed or open loop operation. Closed loop operation favours highly linear scanning and measurements that can be extremely accurate, assuming calibration is done correctly. However, the noise in the sensors is too high for high resolution scanning. So, you can revert to open-loop scanning when high resolution / low noise scanning is required. In this mode, the linearity is lower, but the noise is greatly reduced, allowing for higher resolution scans. Note that this kind of compromise is required on many AFM models, not just the TT-AFM. On the other hand, some modern instruments feature position sensors with very low noise. Essentially, I recommend two sets of settings to use, a "low resolution/high noise/large scan range/high linearity" set and a ""High resolution/low noise/small scan range/low linearity" set. The difference between these settings are numbers to set in the "System" tab.
The default settings are:
| low resolution | |
| Z HV Gain | 15 |
| XY HV Gain | 15 |
| X Gain % | 100 |
| Y Gain % | 100 |
(probably your instrument was originally configured using these settings)
To get a dramtic reduction in noise, and increase in z and xy resolution use:
| high resolution | |
| Z HV Gain | 5 |
| XY HV Gain | 5 |
| X Gain % | 0 |
| Y Gain % | 0 |
NOTES:
1- IMPORTANT! Be careful when adjusting these settings, double check that you do not enter some crazy values. Assume that these fields have no "error check" routine. If you use the wrong values you may damage your instrument!
2 – IMPORTANT! I am assuming you are using v2.03 of the software, if not, the procedure will probably be different. At the time of writing v2.03 seems to be the best version.
3- These values are, I believe, saved in the scanner.cfg file, so you could set up two files, with the two sets of values to be more convenient, and avoid any errors in typing the values.
4- Reducing XY HV Gain reduces the scan size, so a Range check is ABSOLUTELY necessary. Even if it does not look like it's necessary, in general I would recommend re-doing range check, after changing any of the XY parameters.
5- The difference compared to the images you sent, should be a reduction in XY jitter at the edges of your features (tubes). Essentially, the Gain(%) values control the feedback from the XY position sensors. The signal they give is very noisy compared to the precision of the piezos, so by setting this to 0, you turn off the sensors, and remove this noise.
6-Because of point 5, the "high resolution" mode is NOT LINEAR. This may mean some XY distortion in your images, and inaccurate zooming.
7- When you reduce XY HV Gain, you reduce the range in XY. So these values above gave you reduce range by 2/3, and you end up with a range of around 16.6 um. If you want to do large scans, you could turn off the sensors, but leave HV gains alone, so you would use:
| low noise/large range | |
| Z HV Gain | 15 |
| XY HV Gain | 15 |
| X Gain % | 0 |
| Y Gain % | 0 |
8- As a side note, if you ever used another AFM, this may seem a bit fiddly, but in fact all of these settings are used in other AFM systems as well. The difference with the TT-AFM is it is manual, not done automatically. Yet. Of course, this is one reason why the instrument works out at such a low price!
TIP APPROACH FOR HIGH RESOLUTION
If you use the settings above for the first time, you may notice a drastic improvement in noise level. Then you may well start to see other issues become apparent. For one, you may be able to see whether your vibration/acoustic noise isolation system really works or not! Another issue is probe tip size.
In all AFMs, the achieved resolution is controlled by the size of the probe tip WHILE SCANNING. That means, not the size of the tip in the box, but on the sample. What happens between the probe being nice and sharp in your box, and scanning your sample? Tip Approach! Good tip approach is crucial for high resolution scanning. Below I include two tips to improve the chance of beginning your san with a sharp probe:
1. Use conservative tip approach parameters. By conservative, I mean a slow, well-controlled tip approach, which does not result in a low set point. By default, your system probably came with tip approach parameters that guarantee a successful approach every time, but also pretty much guarantee you will not have a sharp probe after approach. Again, I am assuming you are using V2.03 of the software. The tip approach routine is completely different in some other versions of the software. Look at the collection of controls in the System Tab, labelled “Tip approach parameters”, highlighted below.
Note that these parameters are considered “Advanced Controls” by the AFM Workshop Software. They may therefore be hidden. There is a grey button on the Pre-Scan tab (location highlighted below) that makes these control appear and disappear.
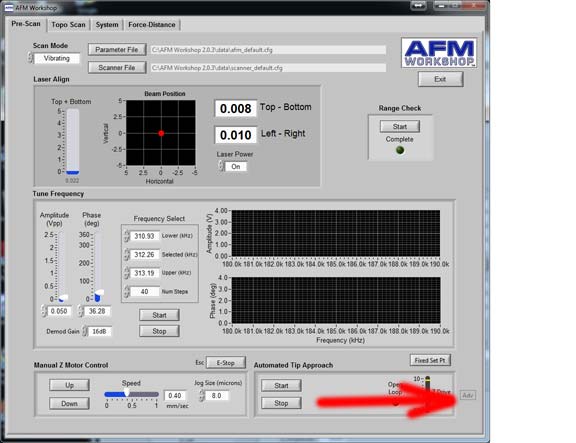
Incidentally, just above here, is a control that swaps between “Update Setpoint” and “Fixed Setpoint” Ensure this is set to “Update Setpoint” EVERY TIME you approach.
There are two things I recommend you can change in the tip approach parameters to enable a conservative approach. Firstly, and most importantly, you should adjust the value labelled “extend factor” to reflect the setpoint upon approach. This is a fraction of the free amplitude, which is used to detect approach. Lower values will lead to a lower setpoint (vibrating mode). So, lower values will be less prone to false feedback, but more prone to blunting your probe. I recommend you experiment with values between 0.91 and 0.94.
2. There is a bug in the software which might cause rather rapid translation when the scan region moves one place to another. Essentially, after range check, if you request a scan in the centre of the scan range, the probe will move very quickly to your requested spot, which could lead to probe damage. To avoid this (especially when you have a new probe, and want high resolution). Before any tip approach, set the scan center and scan range to your desired initial values, and begin a scan BEFORE approach. Allow the software to collect one scan line (it should be empty), then stop the scan. Now approach, and start scanning. In this way, translation to the initial scan position is minimised.
As always, please contact me with any comments on this article. All content copyright 2013 Peter Eaton.